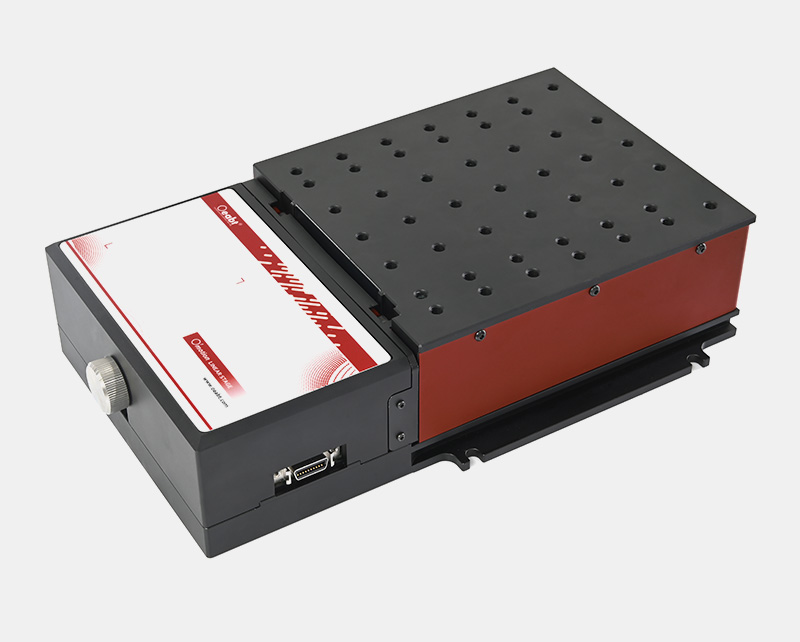















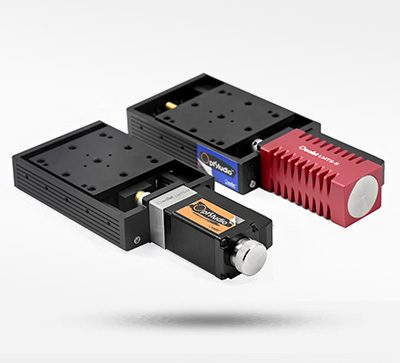

• 兼具亚微米级增量与高负载力的升降平台,升降行程25mm;
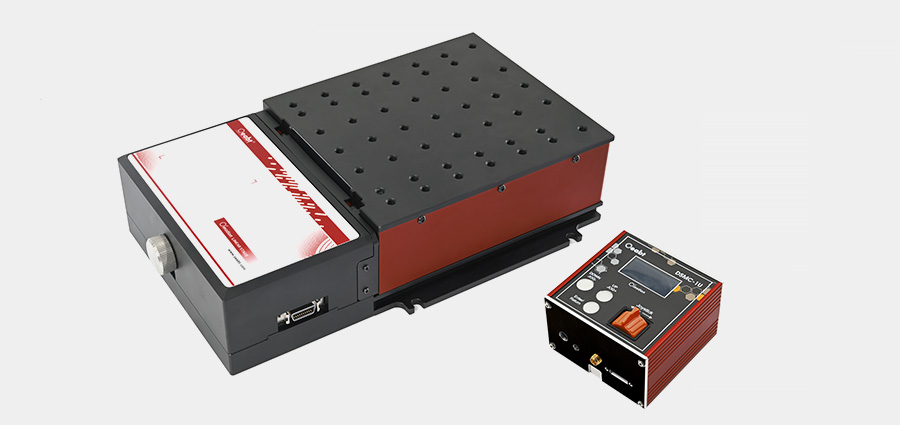
• 需配套OSMC-1U单轴步进控制器使用;
• 支持点动、慢跑、霍尔无级变速前后进给等自由运动控制模式;
• 支持在Windouws/Linux/MacOs/Android等操作系统下开发上位机控制程序,实现跨平台应用;
• 提供windows版本的上位机控制程序样例及通信协议文档,方便用户进行二次开发或系统集成;
|
规格 |
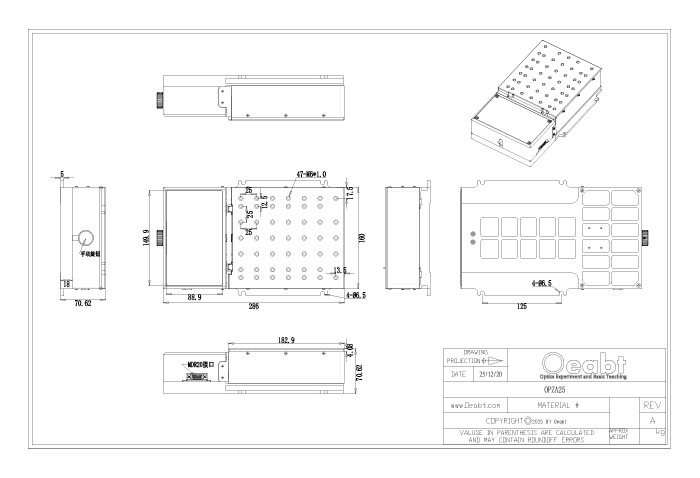
286.0*181.5*72.3mm |
|
升降行程 |
25mm |
|
平台高度 |
最低平台高度:72.3mm;最高平台高度:99mm |
|
台面尺寸 |
178*160mm |
|
丝杠类型 |
Ø12mm 精密滚珠丝杠,导程2mm |
|
导轨形式 |
双直线导轨 |
|
负载能力 |
建议值≤65磅(30kg) |
|
重量 |
5.65kg |
|
精度性能指标 |
|
|
双向重复定位精度 |
5μm |
|
反向间隙 |
5μm |
|
平整度 |
≥0.02mm |
|
高/低速档速度、点动距* |
取决于上位机脉冲 |
|
电机、传感器参数指标 |
|
|
电机类型 |
42BYG两相步进电机 |
|
步距角 |
1.8° |
|
微步数 |
51200 |
|
工作电压 |
DC 12 V |
|
工作电流 |
2A |
|
传感器类型 |
槽型光电传感器(NPN常开,高电平有效) |
|
推荐驱动器/控制器 |
OSMC-1U单轴步进控制器、O’motion 四轴运动控制系统 |
|
注*:最高、最低运动速度及点动距取决于运动控制器的脉冲频率及设定,因此上述*号标注参数,均为采用Oeabt® O’motion 四轴运动控制系统下的测试结果。 |
|
|
OSMC-1U 单轴步进控制器 |
|
|
型号 |
OSMC-1U |
|
驱动电压 |
DC 12V-24V |
|
驱动电流 |
2A Max |
|
驱动类型 |
16 bit PWM控制 |
|
控制算法 |
PID |
|
高分辨率步进 |
每转 51200 微步(对应 1.8° 步距角电机) |
|
细分倍数 |
16X-256X(软件调整) |
|
编码器反馈带宽 |
500 Hz |
|
位置计数器 |
32 bit |
|
操作模式 |
位置、速度、动作循环 |
|
加减速曲线 |
S 形 |
|
外触发控制 |
频率识别(PWM信号) |
|
通信接口 |
USB 串口 |
|
通信协议 |
开放ASCII指令 |
|
支持系统 |
Windows / Linux / MacOS / Android |
|
电机连接器 |
D-sub 26(开环控制为 MDR20 型) |
|
限位开关输入 |
正限位,0点限位 |
|
编码器电源 |
DC 5V输出 |
|
面板控件 |
霍尔无极调速操纵杆、1.54 英寸 OLED(中文菜单) |
|
断电记忆 |
有,保持原位 |
|
外壳尺寸 |
76.0*74.2*47.0mm |
|
重量 |
183.5g |
|
注*:通过脉宽识别时,需专用复杂信号发生器生成先导脉冲宽度不同的信号来判断运动方向,根据脉冲频率调整运动速度;而采用频率识别时,仅通过频率高低来判断运动方向,速度则服从用户的全局速度设定(1-8x),因此对用户信号要求简单,具备调频特性即可。 |
|






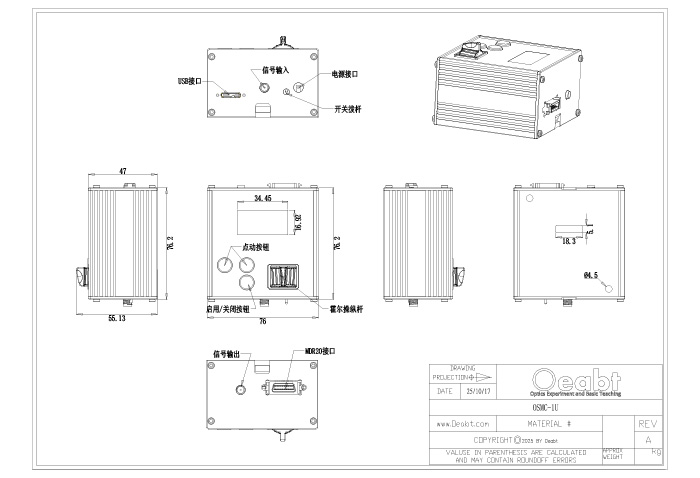
 OSMC-1U 工程图下载
OSMC-1U 工程图下载