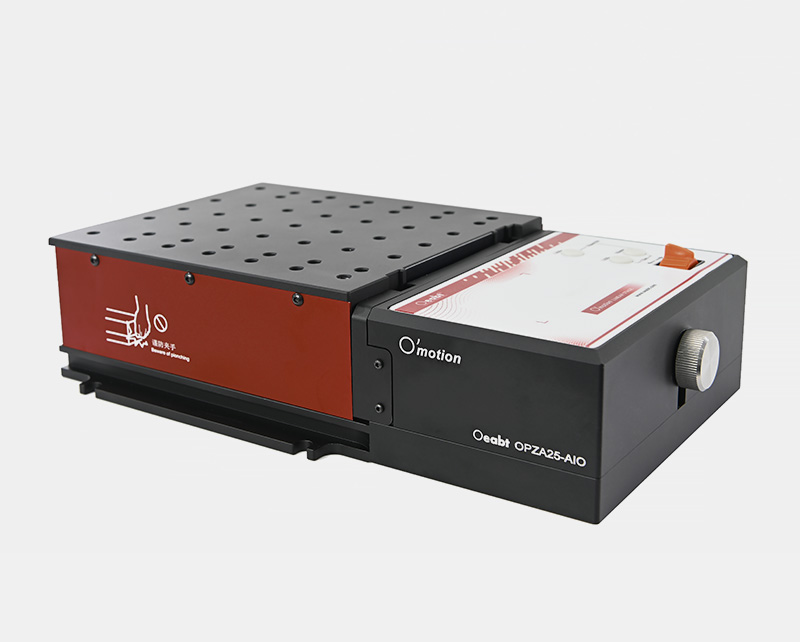
















• 内置驱动与控制电路,采用双向出轴42BYG两相步进电机,同时支持电动/手动双模式;
• 内置PID控制功能,加减速曲线平滑,运动执行器启停进退平稳,无顿挫感;
• 驱动脉冲默认采用256x细分,从而使运动平台运行平稳,安静,稳定;
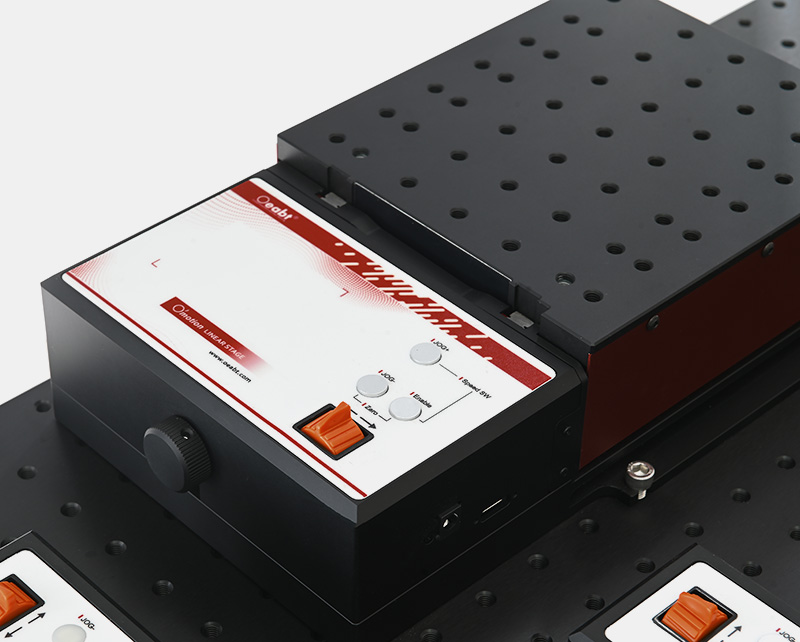
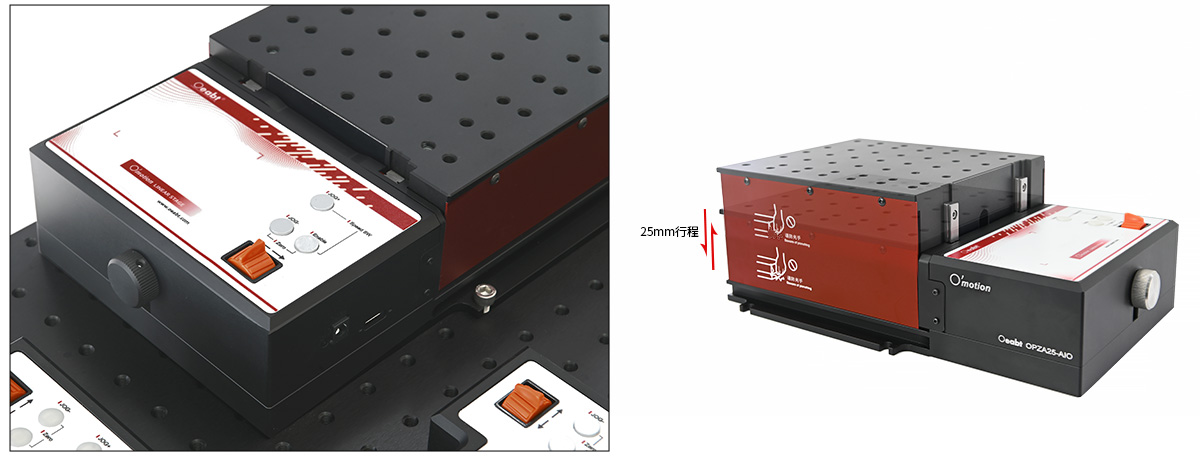
• 采用霍尔操纵杆,可对直线运动平台进行实时的、线性的、平滑的无级加减速控制;
• 支持点动、慢跑、霍尔无级变速前后进给等自由运动控制模式;
• 支持记忆断电前行程位置功能,重启后不自动归零(可手动操作);
• 通过组合按键执行电机复位及速度切换(快慢两档);
• 支持通过USB串口通信与上位机程序程序交互,通信协议采用ASCII O’motion指令集;
• 支持在Windouws/Linux/MacOs/Android等操作系统下开发上位机控制程序,实现跨平台应用;
• 提供windows版本的上位机控制程序样例及通信协议文档,方便用户进行二次开发或系统集成;
驱动控制一体的亚微米级分辨率升降平台,为需要微小增量垂直运动的应用提供了理想解决方案
|
规格 |
286.0*181.5*72.3mm |
|
升降行程 |
25mm |
|
平台高度 |
最低平台高度:72.3mm;最高平台高度:99mm |
|
台面尺寸 |
178*160mm |
|
丝杠类型 |
Ø12mm 精密滚珠丝杠,导程2mm |
|
导轨形式 |
双直线导轨 |
|
负载能力 |
建议值≤65磅(30kg) |
|
精度性能指标 |
|
|
高速档速度 |
2.5mm/s |
|
低速档速度 |
1.83mm/s |
|
点动距* |
82μm |
|
双向重复定位精度 |
5μm |
|
反向间隙 |
5μm |
|
平整度 |
≥0.02mm |
|
电气参数指标 |
|
|
电机类型 |
42BYG两相步进电机 |
|
步距角 |
1.8° |
|
微步数 |
51200 |
|
工作电压 |
DC 12 V |
|
工作电流 |
2A |
|
传感器类型 |
槽型光电传感器(NPN常开,高电平有效) |
|
控制与通信 |
|
|
控制接口 |
USB串口 |
|
通信协议 |
ASCII O'motion指令集 |
|
兼容系统 |
Windows/Linux/MacOS/Android等 |
|
开发支持 |
提供Windows样例程序与协议文档 |
|
推荐驱动器/控制器 |
OSMC-1U 单轴步进控制器、O’motion 四轴运动控制系统 |
注*:最高、最低运动速度及点动距取决于运动控制器的脉冲频率及设定,因此上述*号标注参数,均为采用Oeabt® O’motion 四轴运动控制系统下的测试结果。




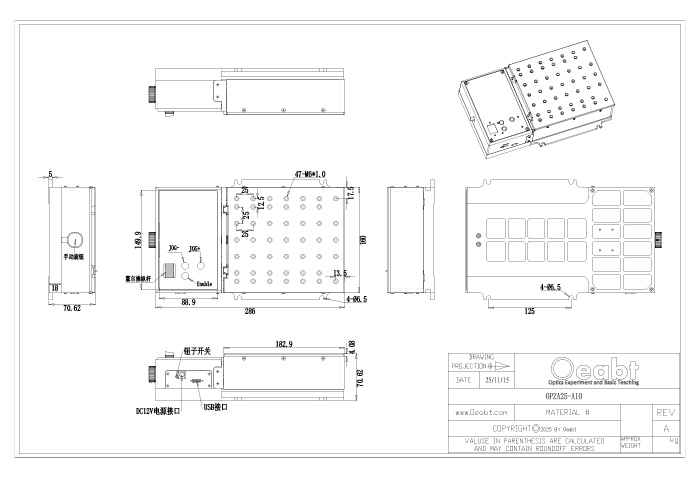
 OPZA25-AIO 工程图下载
OPZA25-AIO 工程图下载